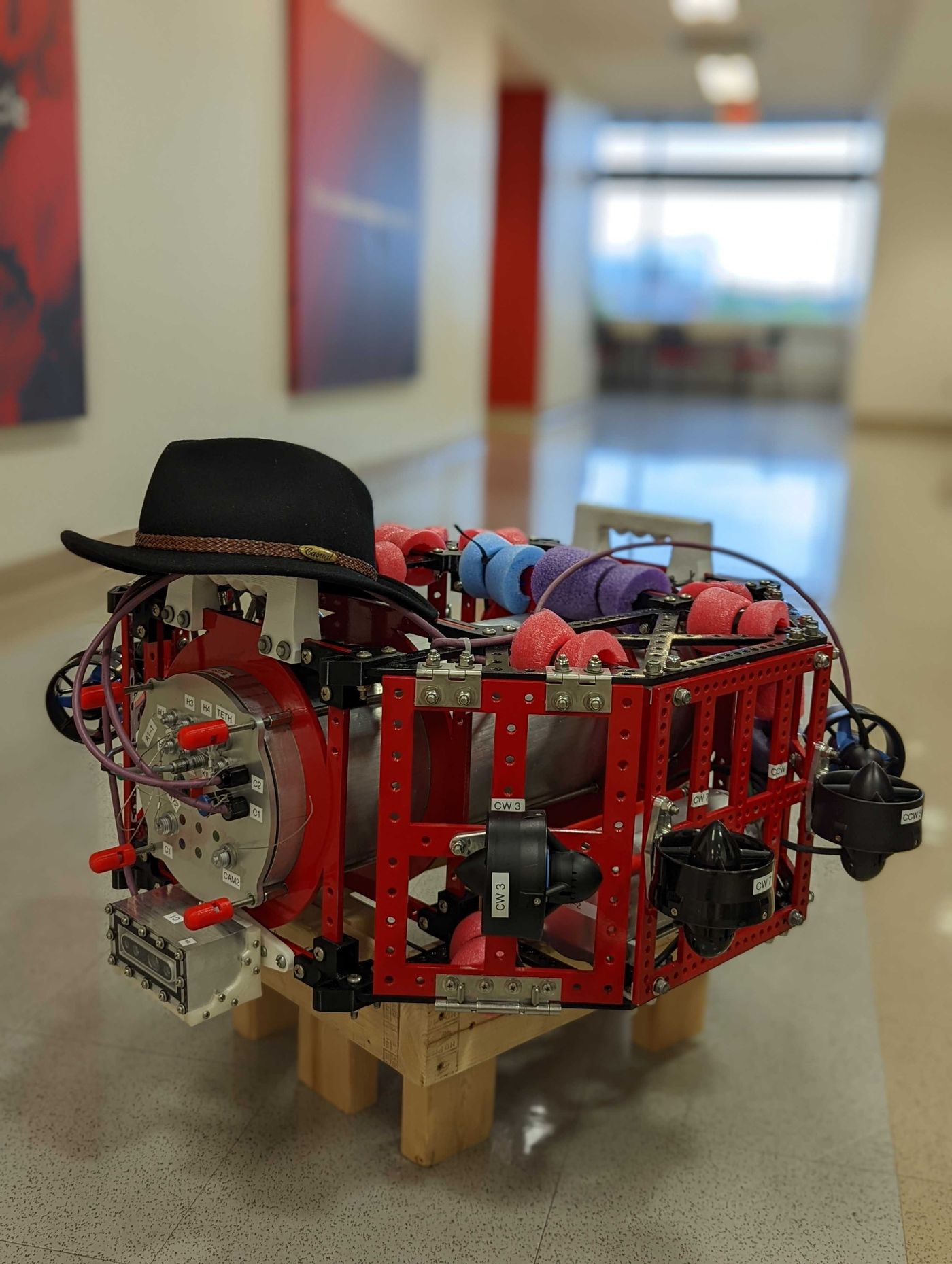
SeaWolf VIII
With 6DOF movement and a full complement of software and hardware systems, SeaWolf VIII is AquaPack's most advanced AUV platform
A Testament to Iterative Design
Mechanical
Omnidirectional Motor System
SeaWolf’s 8 BlueRobotics T200 3-Phase motors are strategically arranged to provide SWVIII with a full 6 degrees of freedom, allowing it to rotate and move in any direction from any position or orientation
Torpedo
SWVIII’s Torpedo system enables it to accurately file two torpedoes through rings or at targets in order to acquire points. A ratcheting mechanism is used to retracts a spring before SWVIII is placed in the water. The spring is released by a lever arm connected to a waterproofed servo motor, allowing SeaWolf to autonomously fire the torpedoes at its desired target
Electrical
MOAB
Electrical info goes here (jack please help)
– To add information to the electrical section, add a markdown file to the electrical folder in the github (src > pages > swVIII > electrical). It’s title will be the lable in the menu, and when expanded, the content there will show up on the page
Software
Machine Vision
Software stuff - See electrical dropdown for details on how to propagate